
PRODUCTCOCKPIT
HATCH
複雑かつ流麗なハッチの開閉ギミックは、初期段階からこだわって開発したポイントです。
リンク機構を搭載し4つのハッチが連動して開閉する様子は、見る人の目を奪い、パイロットの高揚感を高めます。


安定した乗降を手助けするラダー・手すり
コックピットへ乗り込むためのラダー・手すりをアーカックス前部やコックピットの内外に配置しています。
これらは3点支持による安定した乗り降りを手助けしているだけではなく、デザインの一部へと組み込んで見た目を損なわないように配慮しています。

SEAT
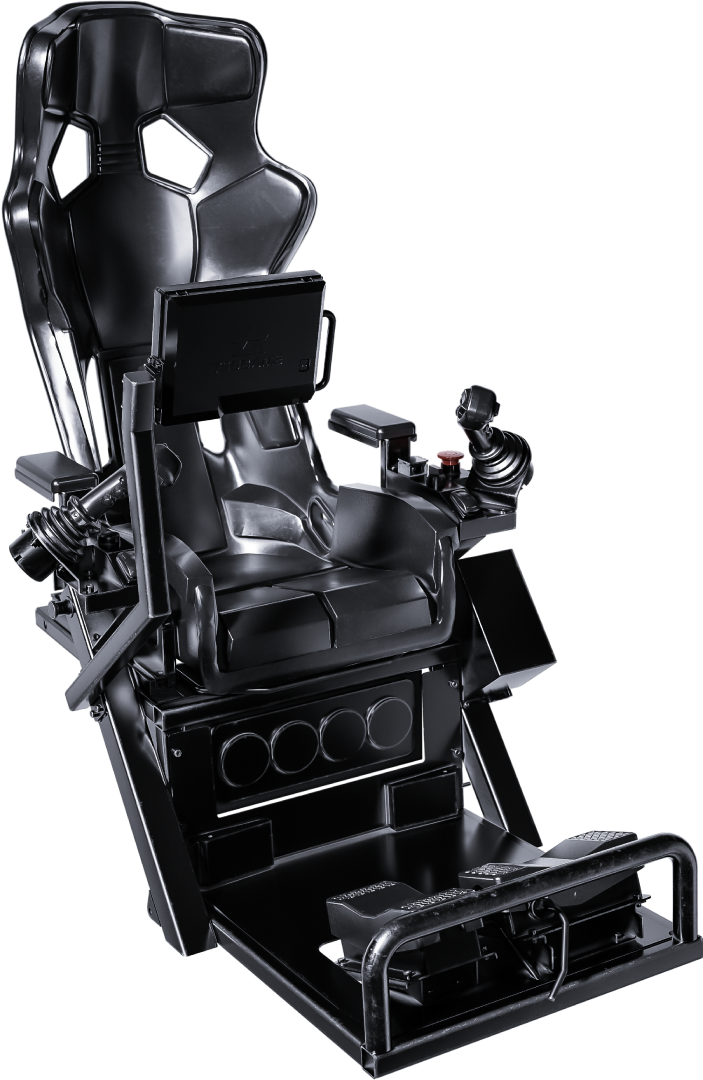
JOYSTICK
シートの左右に1本ずつジョイスティックを配置しています。
前後左右の傾き、スティック上の6つのスイッチと2つのシーソースイッチで操作します。

PEDAL
シートの足元に左が横置き、右が縦置きでシーソー型のペダルを配置しています。
両かかとの部分にはハッチの開閉許可フットスイッチがあります。

SWITCH
シート右手側に、機体の状態が表示されるタッチパネルを配置しています。
モードチェンジやヘッド動作など、一部動作はタッチパネルから操作します。

TOUCHPANEL
ジョイスティック周辺に非常停止スイッチや
運転方式(搭乗、遠隔)を切り替えるスイッチ類を配置しています。

INTERIOR
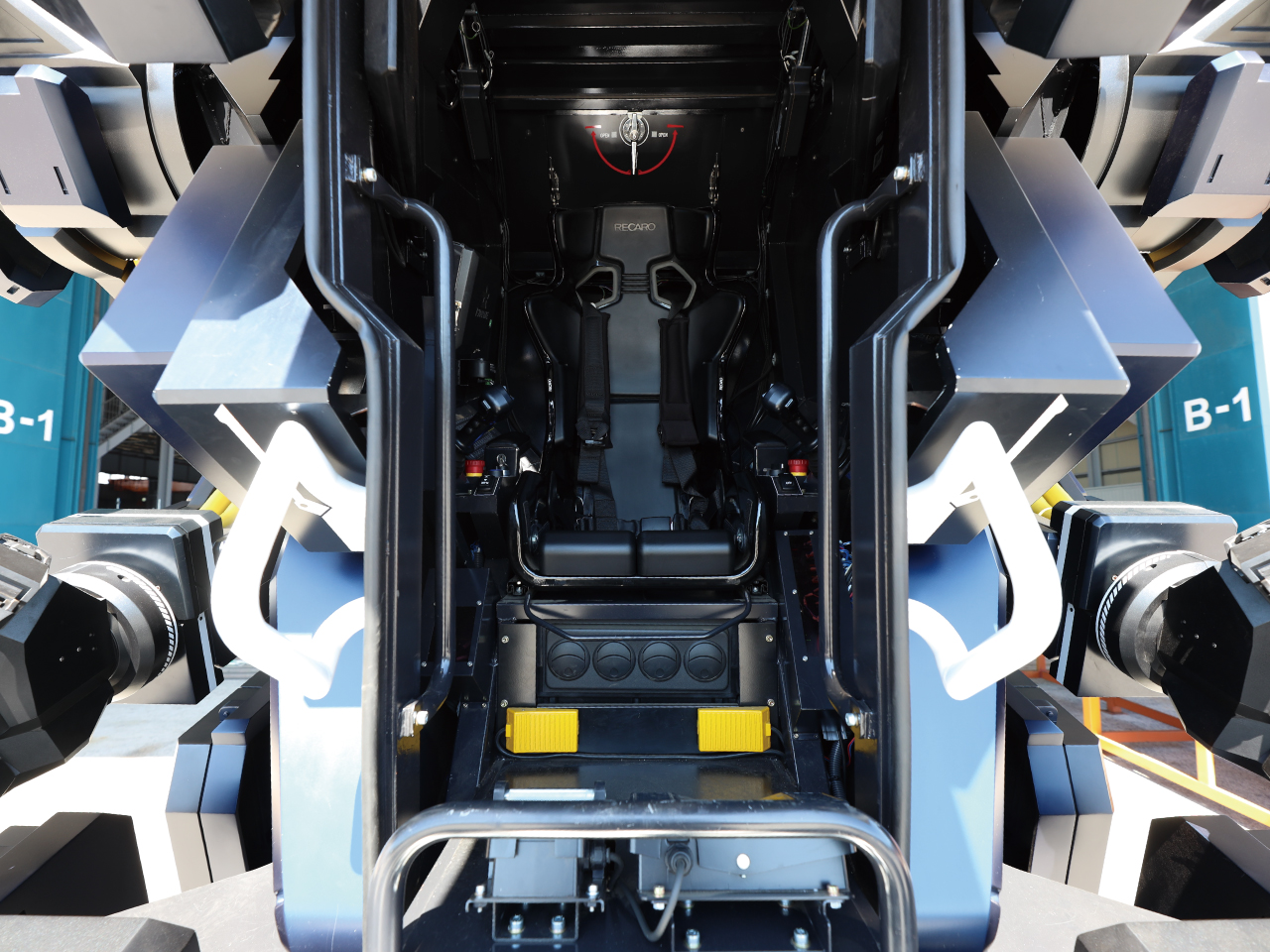
複雑なロボットを操作するデバイスは、開発の中で1/1モックアップを製作し、
複数の操作方式、ミリ単位での配置を試して最適な位置に設置しています。
閉じた空間で外を視認する4面モニター
外装に内蔵されたカメラの映像を映す4面のディスプレイは、アーカックスの前面、背面、左右側方カメラの向きに合わせて配置しています。
パイロットの操作に応じて最適な視界となるように、9つのカメラを自動で切り替えます。
カメラ映像のほか、速度、本体傾斜角、バッテリー残量、腕や機体の状態といった操縦に必要な情報を同時に表示しています。

